





Fast, Low-Cost & Green
Taraxa’s unique t-Graph consensus uses blockDAG, anchor chain, and an asynchronous PBFT to scale blockchain technology without sacrificing security or decentralization.
EVM-Compatible Network
Taraxa is EVM-compatible, deploy your Ethereum dApps with just a few clicks!
Low-Cost Transactions
Send transactions for the cost of… next to nothing.
No Network Congestion
5k TPS, near-instant transaction inclusion, sub-second blocktime and 3.7 second True Finality.
True Decentralization
Truely permissionless network where anyone can be a validator – it even runs on a Raspberry Pi!
AI-Enabled Web3 Ecosystem
AI + Blockchain is the future with Taraxa’s ecosystem paving the way.


trendSpotter
Stay ahead of the game by discovering trends before they're trending. (coming soon)










Stake on Taraxa
Earn rewards and help secure the network by staking your TARA.
Total Stake
2,083 million TARA
Staking Yield
~17.6 %
Validator Commission
~2.0 %
Staking Ratio
50.9 %
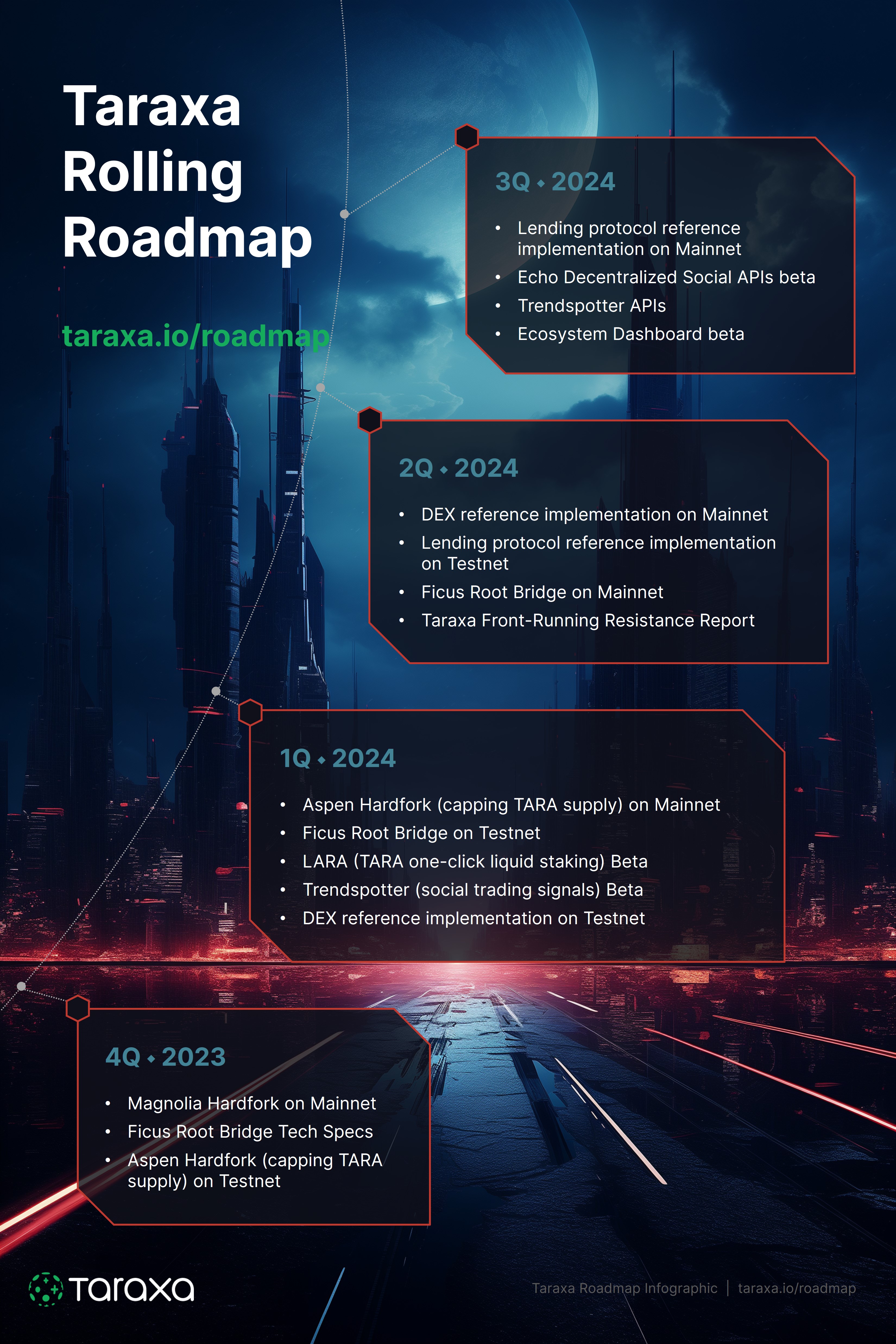
Rolling Development Roadmap
Development will focus on driving adoption of the Taraxa ecosystem.
Learn More
Dig deeper into the Taraxa ecosystem!